INITIAL SKETCH
The basic boat design concept was to have two propellers at the back with no rudder. For balloon popping, we thought about having multiple balloon poppers one on each side.
BUOYANCY CALCULATIONS
Mass estimate of the boat (M) = 8 lb
Density of water (p)= 62.4 lb/ft3
Approx volume of the boat under water = 180(inch2) * h
Submerged height of the boat under water (h) = (8*12*12*12)/(62.4*180) = 1.25 inches
Density of water (p)= 62.4 lb/ft3
Approx volume of the boat under water = 180(inch2) * h
Submerged height of the boat under water (h) = (8*12*12*12)/(62.4*180) = 1.25 inches
PRELIMINARY BOAT CAD
The purpose of the first design prototype was to check the floating level of the boat along with balance in the water with 4 kg weight. The first model was made using pink foam with steep side angles as can be seen in the figure on the right side. While testing this model in water, we figured that the angles are too steep for the boat to balance itself; a slight asymmetry in weight distribution of the components was causing the boat to topple.
|

|
FINAL BOAT CAD
Taking the lessons from the initial design, this design was made with more space for the components at a lower height with a shallow hole in the boat. The side angles were reduced (as shown in figure on right) which helped in achieving better balance in the water. One more change was to have some part at the top with no angle into the water. Also, we inserted a narrow opening at the bottom of the boat to create a water flow channel which would reduce the drag on the boat. This design gave very satisfactory test results for balance in the water for 4 kg weight.
|
|
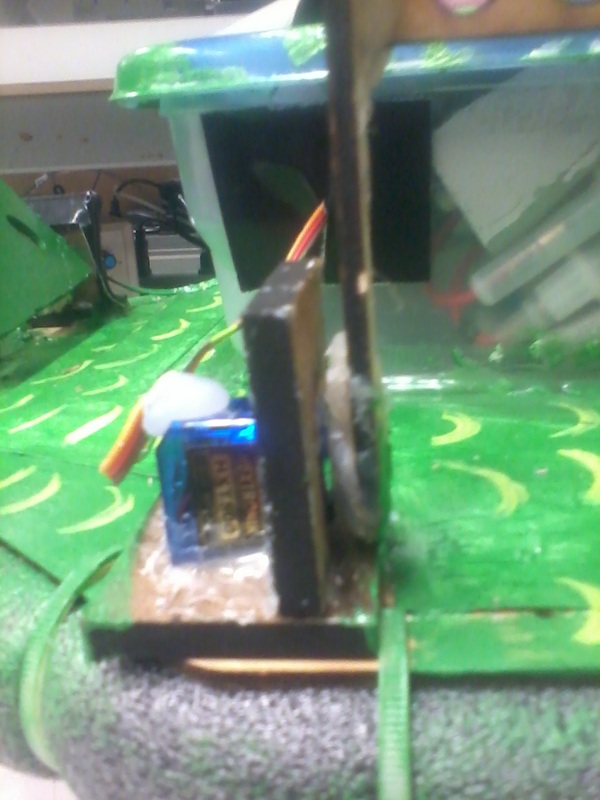
FRONT BALLOON POPPER MECHANISM
The front balloon popper mechanism is in the shape of an alligator which is the theme of our team. This alligator shape mechanism is mounted on a servo motor on one side and is supported by a L-bracket on the other side. The popper is attached to the servo through a wood piece which is glued to a gear on the motor shaft. The popper is connected to the L-bracket through a wood piece and a nut which works as a hinge for the popper. The front bottom of the alligator shape would have sharp pins glued to it which are used for popping the balloons. These pins represents the teeth of the alligator.
|
|
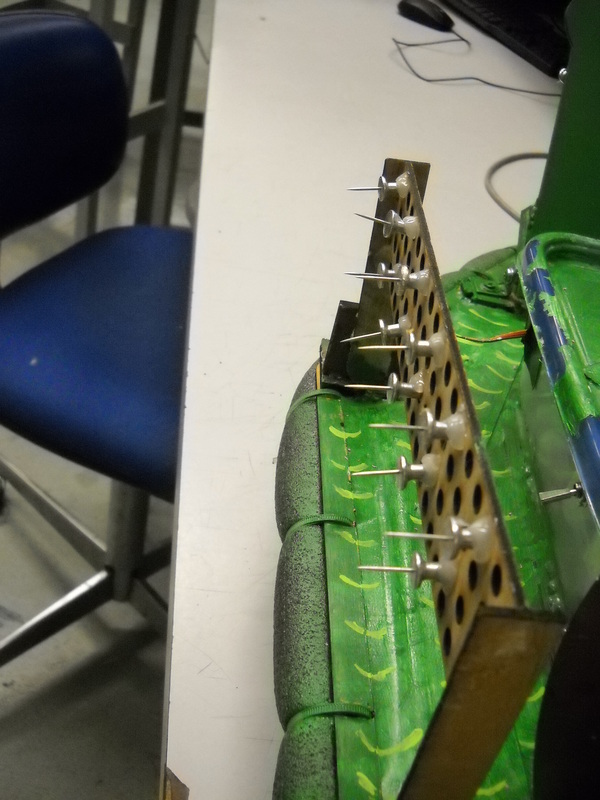
SIDE BALLOON POPPER MECHANISM

This is the design of balloon popper for each of left and right side. The holes have sharp pins glued there to pop the balloons. The mechanism is mounted on a servo motor on one side and is supported by a L-bracket on the other side. The popper is attached to the servo through a wood piece which is glued to a gear on the motor shaft (shown in figure on right). The popper is connected to the L-bracket through a wood piece and a nut which works as a hinge for the popper.
|
|
PROPELLER MECHANISM
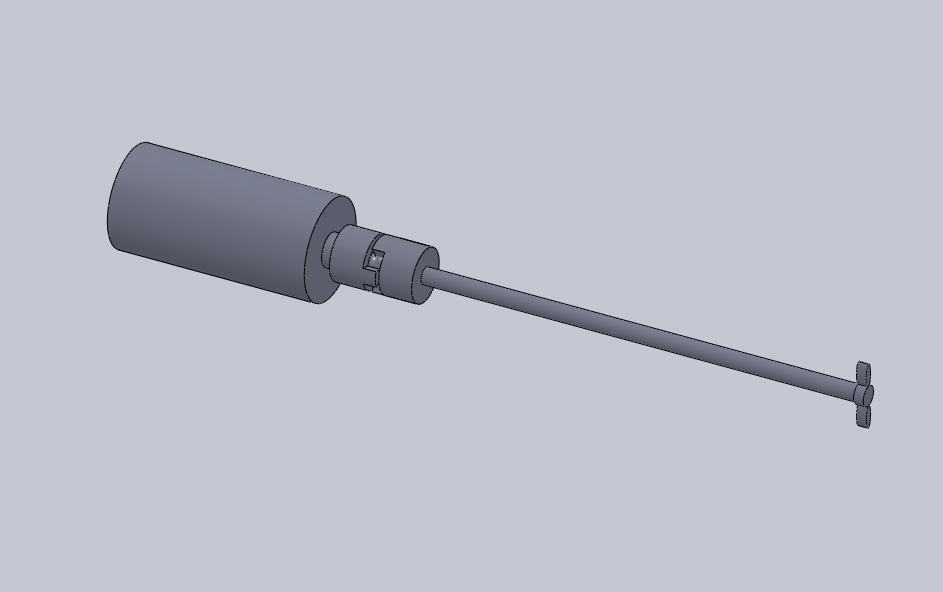
The propeller mechanism for the boat has two propellers on the back side placed symmetrically about the longitudinal axis of the boat. The propellers are also used to control the direction of movement by changing the relative speed of the two propellers. The propellers are mounted on long shafts of 0.25" diameter which in turn are attached to DC motors through universal joint couplings. Universal couplings are available off-the-shelf in the market. We used a 5/8" by 1/4" coupling.
ELECTROMECHANICAL INDICATOR MECHANISM

The electromechanical indicator is a rotating light. This is available off-the-shelf in the market and we hacked into this to replace the switch with a MOSFET to operate it using a microcontroller.
FINAL FUNCTIONAL BOAT

This is the final functional model of the boat with all the components mounted.
LUC (LIVING/UNDEAD CONTROLLER) CAD
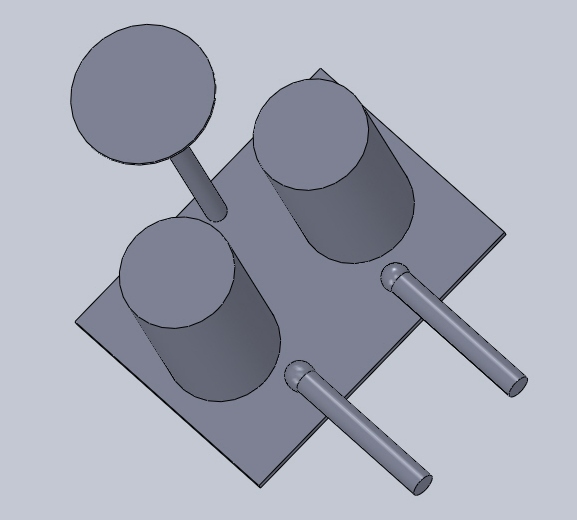
The LUC for our Alligator is a drum system. We used inverted buckets to use as drums; drum hits are used to give speed and direction signals to the boat. We mounted a cymbal which is used as a signal for activating balloon popping mechanisms.
TELEPHONE

We modified a rotary dial phone to use it as an input medium to connect to boats. The user dials the boat number on the phone and it establishes the communication between our controller and a boat.
FINAL LUC

This is the final functional design of the controller with all components mounted.
